スカイオートネットの自律走行核心技術

AI Driving Agent
-
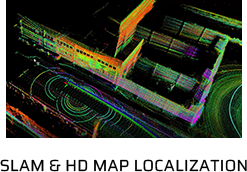
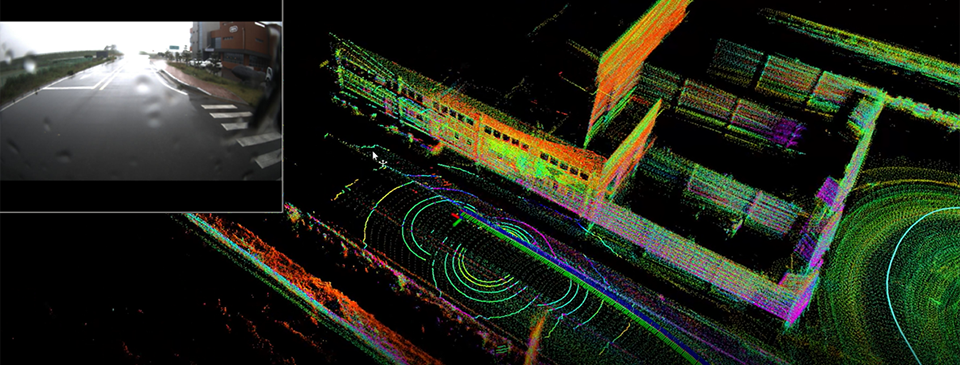
高精細なGPS測位とODOMETRY、*SLAMを活用した車両の位置及び周辺環境分析
-
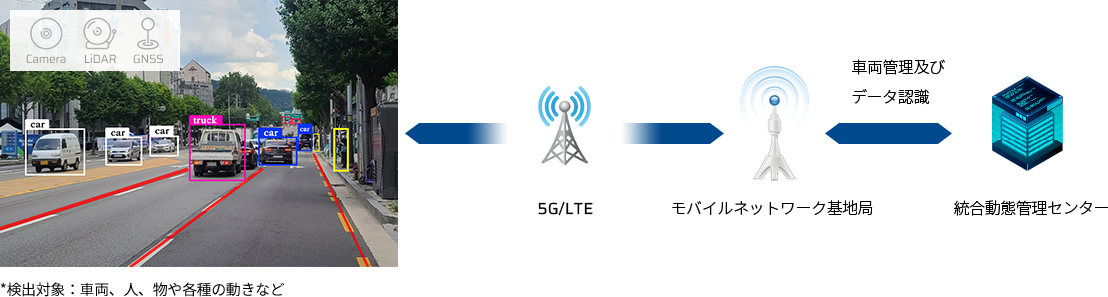
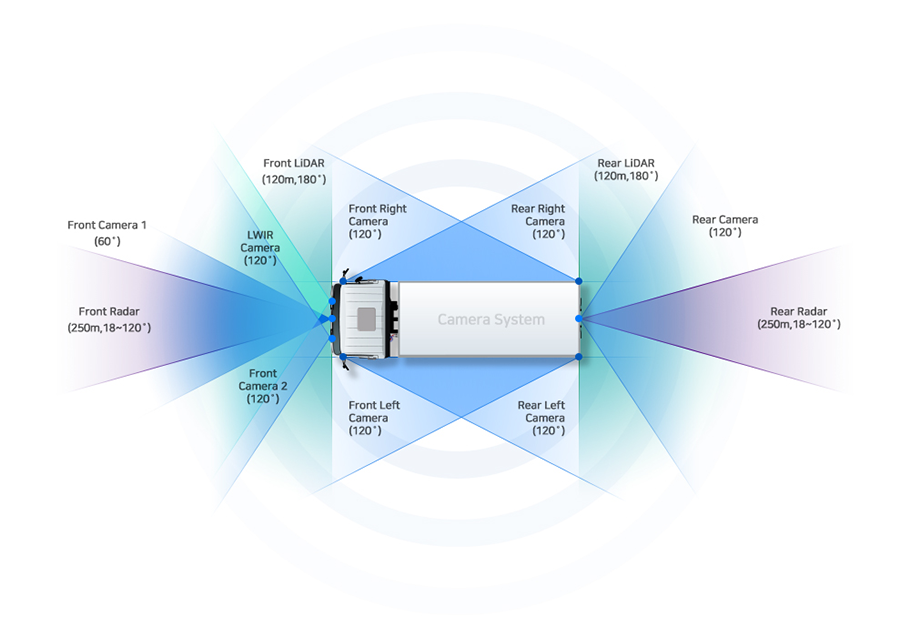
LiDAR、Camera、Radarで取得したデータを基に走行環境を認識し、安全で正確な自律走行を遂行、判断する知能型SW技術
SLAM * : 車両周辺環境の3次元地図の生成及び現位置を把握

Autonomous Vehicle Platform (HW)
-
ヤードトラクター(港湾)、路面清掃車、大型特装車、シャトルバスなど企業顧客のニーズを反映し、各産業に特化した自律走行車両改造及びモジュール開発
Sensor Fusion Technology
-
客体との距離、客体移動方向を分析して事故を予防する緊急制動システム開発
-
LiDAR、Radarなど多重センサーを融合し、車両の位置認知および周辺環境地図化(SLAM)
-
陰影地域でも正確な位置認知及び走行距離測定(Odometry)

Intelligent Image Processing SW
-
専用カメラモジュール及びイメージ前後処理SW独自開発
-
車両の特性及び外部環境を踏まえたSW最適化及びキャリブレーション遂行
-
客体認識、車線検出、ポットホール認識などAIベースの映像処理技術開発
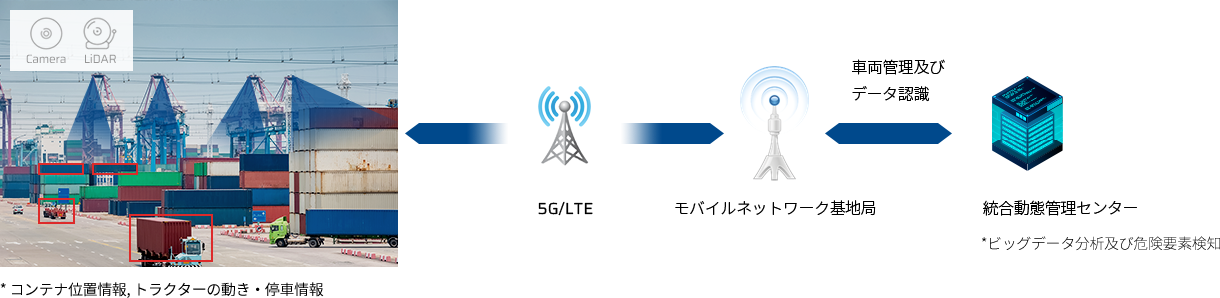
Autonomous Vehicle Management
-
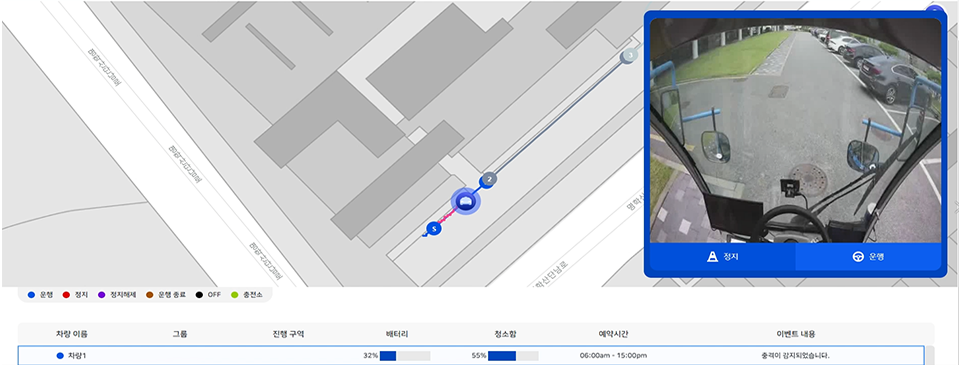
クラウド基盤の自律走行車両動態管理(Mission Control)技術開発
-
多数の自律走行車両のモニタリング及び状態分析
-
遠隔で自律走行車両の呼出及び移動